

Walking comes naturally to humans, but for robots it remains one of the toughest engineering challenges. Legged robots have complex, non-linear dynamics that make stable walking difficult to achieve. The most advanced platforms, such as those developed at leading research institutions, demonstrate impressive agility on rough terrain—but they are prohibitively expensive for many universities and research groups.
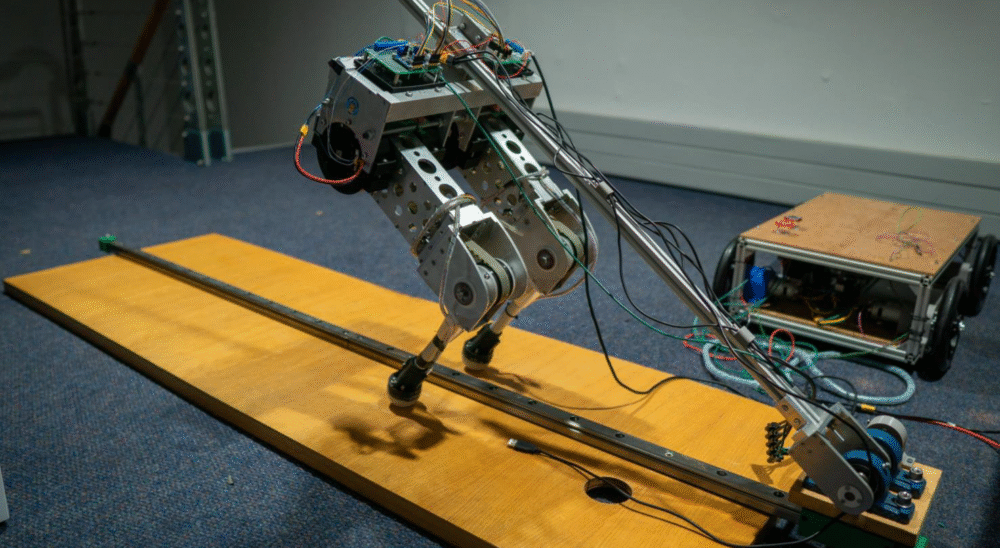
This cost barrier inspired Jean Louis van der Walt, a Master of Electrical and Electronic Engineering student at Stellenbosch University, to take a different approach in his thesis. Instead of relying on high-end systems, he worked with Q-Bert, a 10 degree-of-freedom (DoF) bipedal robot designed in-house as a cost-effective test platform. His goal: to prove that with the right algorithms and control systems, even modest robots can learn to walk reliably.
Background to the Research
Van der Walt begins by framing legged locomotion’s twin challenges: modelling discrete foot‑ground contacts and generating stabilising control torques fast enough for real time. Jean’s research focused on two main areas:
- Generating walking trajectories: Using mathematical modelling and optimisation methods, he created a reference walking gait for Q-Bert. This trajectory accounted for joint movement, ground contact, and physical constraints of the robot.
- Designing a dual-layer control system: A high-level model predictive controller (MPC) calculated desired motor torques in real-time, while a low-level proportional controller fine-tuned the signals to ensure smooth movement. Together, these controllers gave Q-Bert the ability to follow the optimised walking gait.
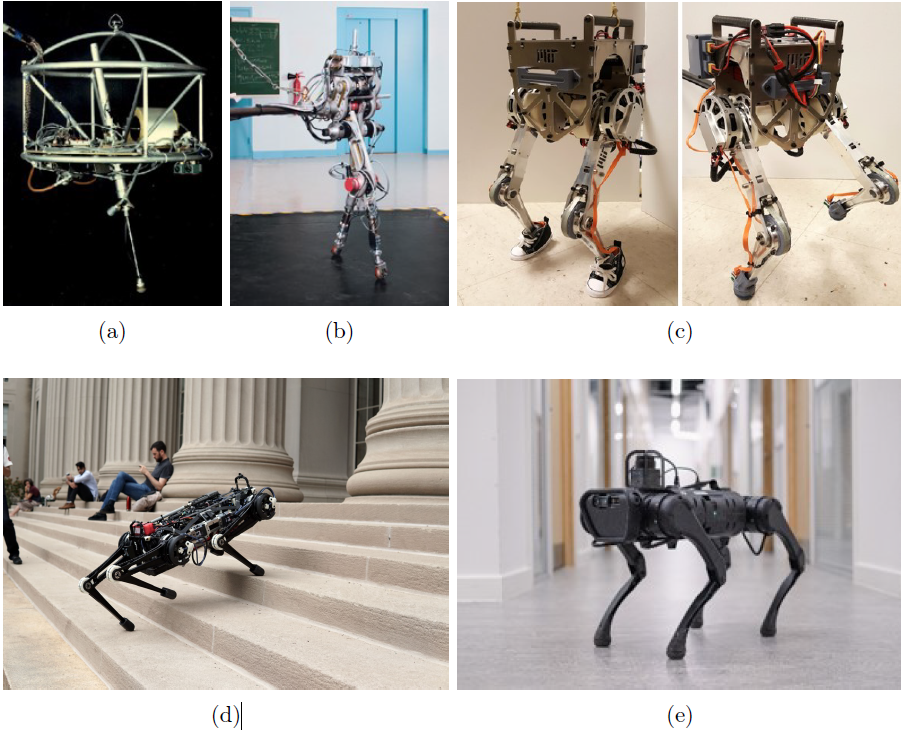
Examples of the three different main categories of legged robotic platforms (monoped, biped, quadruped) developed either in industry or during research: Raibert’s Hopper (a), RABBIT (b), Little Hermes (c), MIT Cheetah 3 (d), Unitree A1 (e).
Key Results
After months of modelling, coding, and refining, Jean tested Q-Bert in the lab. The robot was able to take 10 successful steps: five with each leg, covering an average distance of 1.06 metres. Across the four joint trajectories, Q-Bert achieved an average tracking accuracy of more than 91%, with a small error margin of 8.65%.
For a robot with simplified mechanics, these results are significant. They demonstrate that robust walking can be achieved without expensive platforms, provided that advanced control strategies and careful optimisation are applied. Importantly, because the walking gait is periodic, Q-Bert’s steps can be extended indefinitely—making longer walks possible with the same control approach.
Impact and Next Steps
This work highlights how cost-effective platforms can still contribute to cutting-edge robotics research. By proving that a relatively simple robot can walk with stability, Jean’s thesis provides a foundation for future studies in locomotion that might otherwise have been restricted to well-funded labs.
The next steps for Q-Bert include:
- Upgrading to onboard power and computing for more autonomy.
- Refining the walking gait to improve foot clearance and stability.
- Testing the robot on rougher terrain.
- Exploring advanced movements such as jogging or running.
By tackling these challenges, Q-Bert could evolve from a walking prototype into a versatile research platform capable of testing a range of locomotion strategies.