HOME
UNDERGRADUATE
Prospective Undergraduates
Current Undergraduates
POSTGRADUATE
Prospective Postgraduate
Current Postgraduates
Postdoctoral Vacancies
SHORT COURSES
Smart Grid Technology
RESEARCH
Computers & Control
Electrical Energy Systems
Electronics & Electromagnetics
Signal Processing & Machine Learning
STAFF
NEWS
CONTACT
HOME
UNDERGRADUATE
Prospective Undergraduates
Current Undergraduates
POSTGRADUATE
Prospective Postgraduate
Current Postgraduates
Postdoctoral Vacancies
SHORT COURSES
Smart Grid Technology
RESEARCH
Computers & Control
Electrical Energy Systems
Electronics & Electromagnetics
Signal Processing & Machine Learning
STAFF
NEWS
CONTACT
trajectory optimisation
Home
NEWS
trajectory optimisation
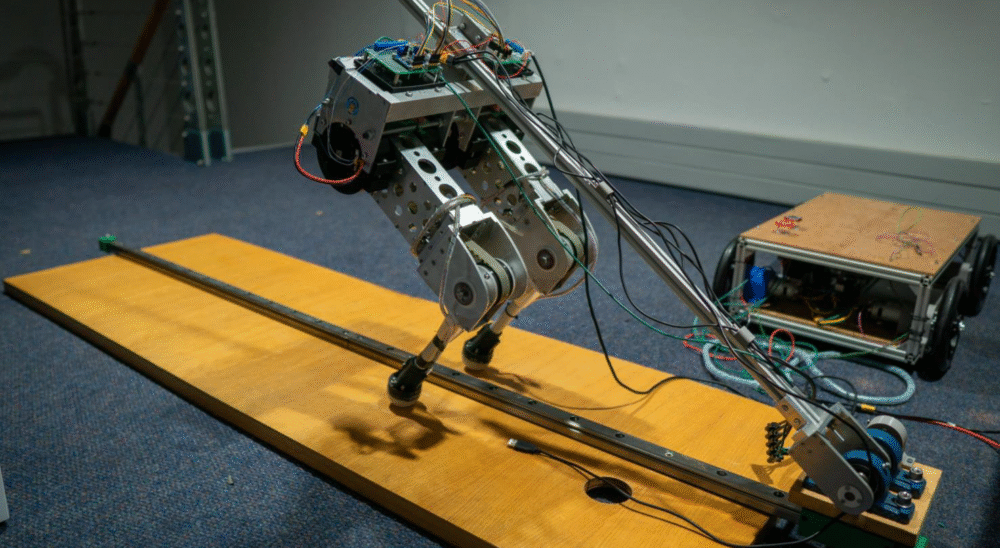
Q-Bert: Walking for a Bipedal Robot
18 August 2025
Posted by
Valpre
General News
bipedal robot
,
humanoid robotics
,
model predictive control
,
trajectory optimisation
Walking comes naturally to humans, but for robots it remains one of the toughest engineering challenges. Legged robots have complex, non-linear dynamics that make stable walking difficult to achieve. The
…
Read More
Search for:
Search
Recent Posts
“It Depends”: Using Models to Chart the Uncertainty of South Africa’s Power System
Inaugural Lecture: Prof Arnold Rix’s Vision for Engineering a Stable, Low-Carbon Future
Autonomous Racing on Unseen Tracks Using Reinforcement Learning
The Development and Control of an Autonomous Sailboat
Wireless Dendrometer and Environmental Sensing System for Tree Growth Monitoring